
F405 flight stack • INAV • GPS/GLONASS • ELRS • Full avionics integration & sensor fusion tuning
What I Built
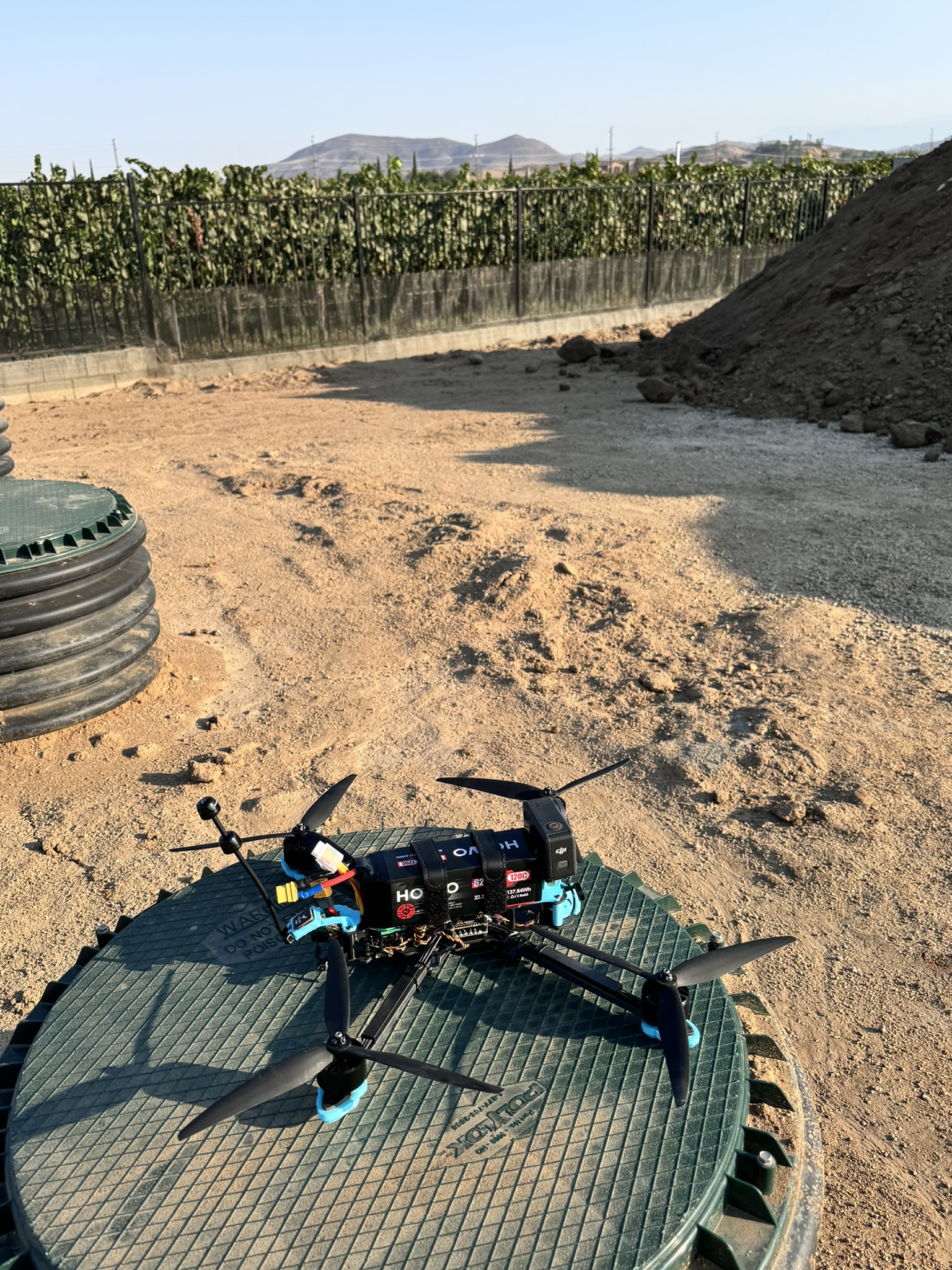
This aircraft started as a blank frame and became my most stable long-range quad’s to date. Every part of the flight system-wiring, avionics, filtering, and control tuning was engineered, tested, and optimized by hand. The goal wasn’t just to build a drone, but to build a full-stack, long-range UAV platform with reliable navigation, clean sensor data, and predictable autonomous behavior.
Flight Stack
- F405 controller running INAV
- GPS/GLONASS, magnetometer, barometer
- ELRS receiver for long-range control
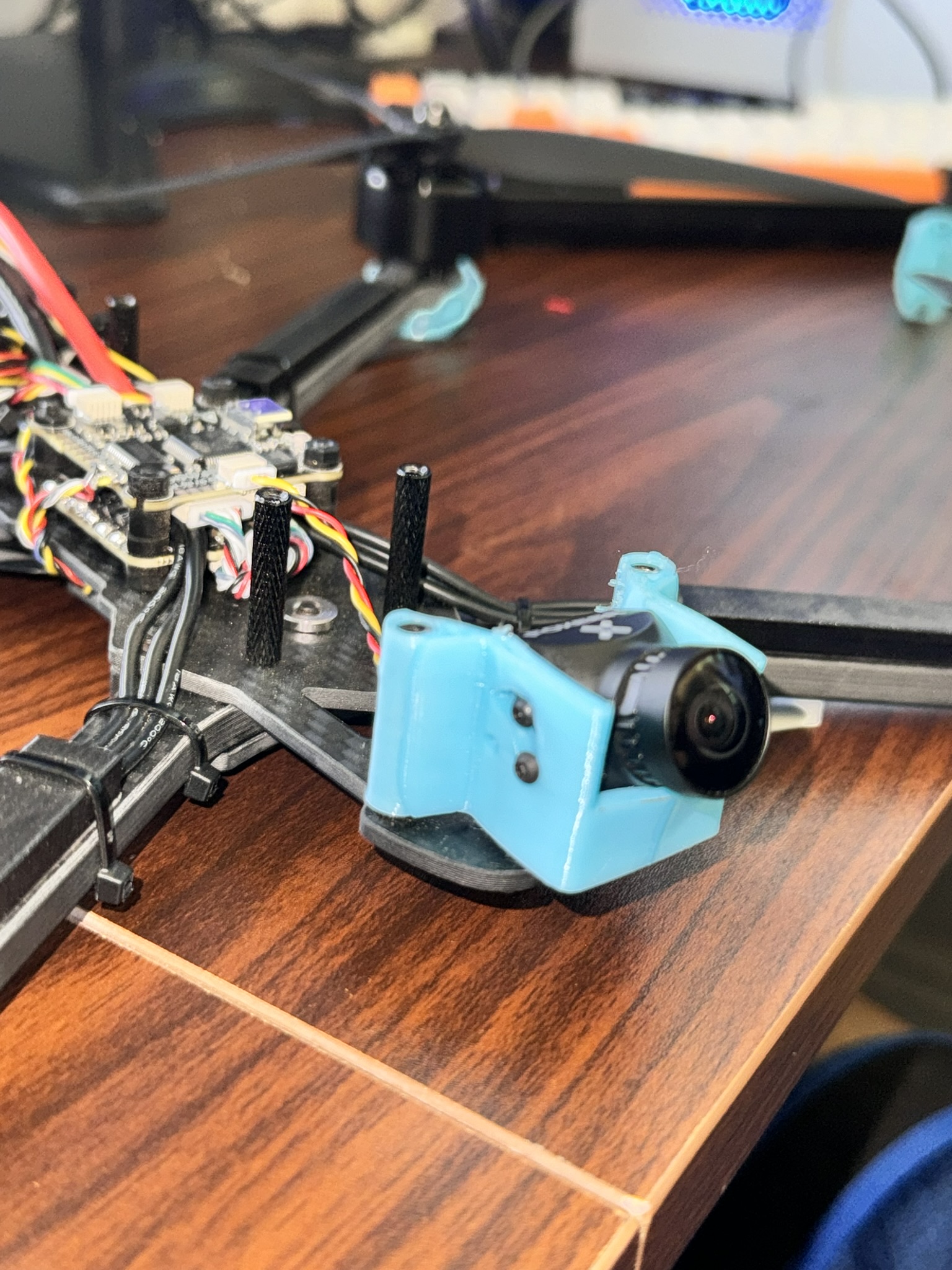
- FPV camera + Analog VTX for live telemetry
My Engineering Contributions
✔ Full Avionics & Power System Integration
I designed the entire electrical and sensor layout:
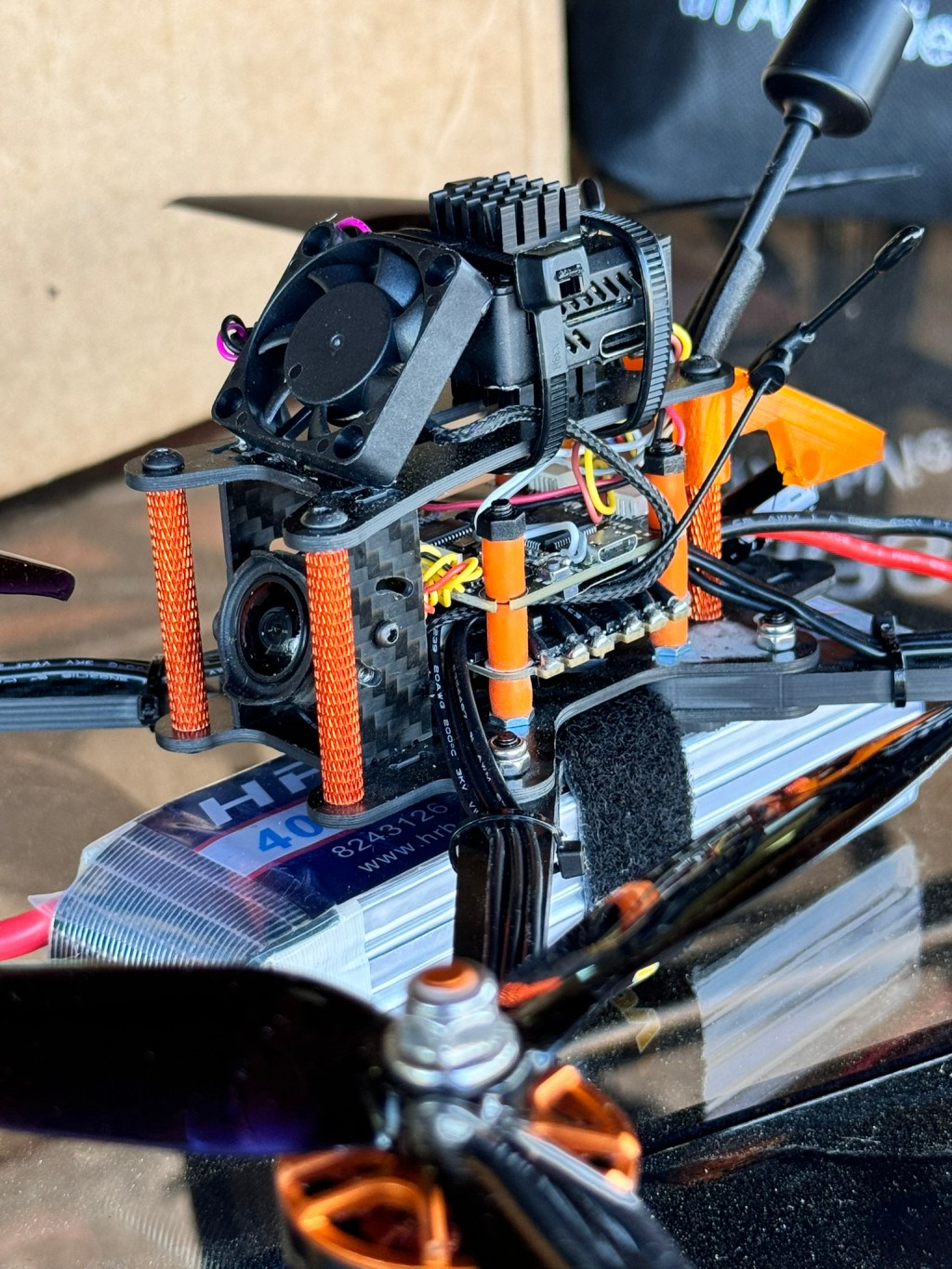
- Power distribution & current handling
- ESC integration
- Isolated IMU mounting to eliminate frame resonance
- Clean grounding strategy to avoid gyro noise and brownouts
✔ PID, Filtering, and Sensor Fusion
Tuned the entire INAV control loop:
- Custom PID profiles
- Filter coefficients (LPF, D-term, gyro filtering)
- Dynamic notch filters
- Magnetometer calibration
- GPS filtering & initialization behavior
✔ Navigation & Autonomy
Configured and validated:
- Failsafes
- Return-to-Launch
- Geofencing
- Telemetry logic
- Flight mode transitions
✔ Blackbox Diagnostics & Control Optimization
I ran deep diagnostics to tune out problems:
- Gyro noise profiling
- Motor harmonics & vibration analysis
- D-term and P-term refinement
- Noise isolation and dynamic notch placement
- High-throttle oscillation elimination

Why This Build Matters
This wasn’t just assembly — it was end-to-end UAV engineering.
The 10-inch platform taught me how:
- noise moves through a large frame
- sensor fusion reacts under long-range flight stresses
- GPS + magnetometer + barometer interplay under INAV
- to tune an aircraft for stability, efficiency, and autonomy simultaneously
It’s the closest thing to a “mini airframe engineering project” I’ve done, and it directly sharpened my skills in:
- avionics integration
- long-range reliability
- noise mitigation
- dynamic control tuning
- navigation/autonomy configuration
Those same skills carry straight into robotics, manufacturing automation, and systems engineering.




Leave a comment