

Reverse Engineering the Parrot Disco – 4G Mod, Firmware Rewrite, and a New Airframe
The Parrot Disco was never meant to fly the way I pushed it — but that’s exactly why this project exists. This post kicks off my portfolio with one of my favorite builds: taking a fixed-wing consumer drone, ripping out its limitations, and rebuilding it into a long-range UAV with real autonomy, 4G connectivity, and a completely new airframe.
What I Started With
The stock Parrot Disco is a fun platform, but it comes with hard ceilings:
- Short range
- Weak bidirectional radio link
- Closed firmware
- Limited flight controller behavior
- Locked-down hardware integrations
Good for casual flying – not good enough for me.
What I Did
I broke the system open and rebuilt it the way it should have been designed:
- Reverse engineered the firmware and removed the restrictions
- Implemented a full 4G softmod, turning the aircraft into a network-connected UAV
- Transplanted the flight controller into an entirely different airframe
- Integrated custom wiring, power distribution, and sensor layout
- Re-tuned stabilization and navigation behavior for the new platform
- Optimized its long-range performance far beyond what Parrot intended
What started as a toy became a reliable long-distance aircraft with:
- real-time telemetry over LTE
- extended endurance
- cleaner aerodynamics
- better performance in wind
- full manual and assisted flight capability
Why This Build Matters
This project is where I sharpened a lot of the skills I use today:
- firmware modification
- RF systems
- long-range connectivity
- avionics integration
- sensor fusion tuning
- flight controller behavior analysis
- hardware re-platforming
- custom wiring + EMI management
And it cemented my love for engineering UAV systems from the ground up – not just flying them, but understanding every layer that makes them work.
More builds are coming, but this one is a perfect introduction to the kind of engineering I enjoy:
breaking boundaries, modifying systems, and pushing hardware far past what it was designed for.
– Charles Pyrce
Parrot Disco with a 4G Softmod, High-Capacity Battery, and Redundant Standalone GPS Tracker:
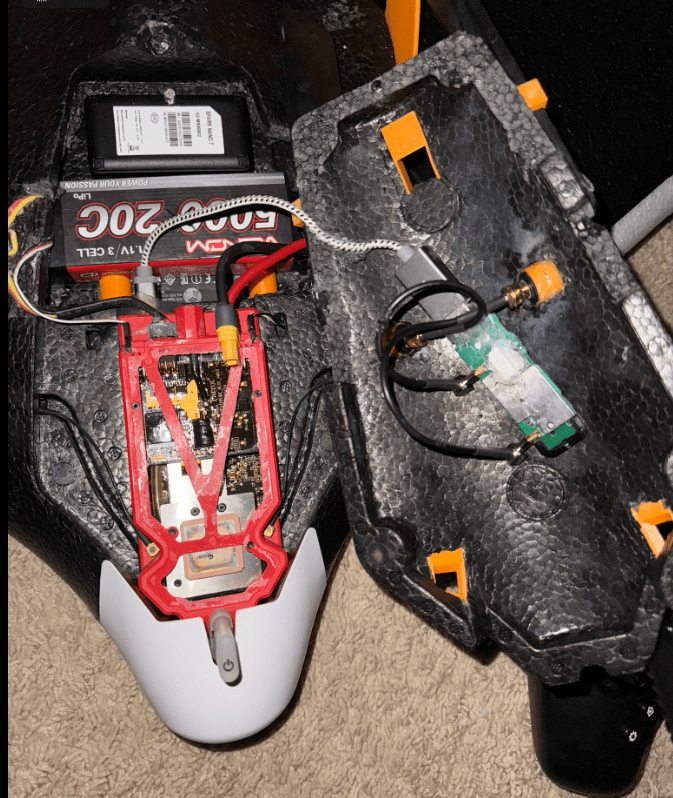
Crashed due to a mistuned PID controller:

Post crash flight controller transplant:


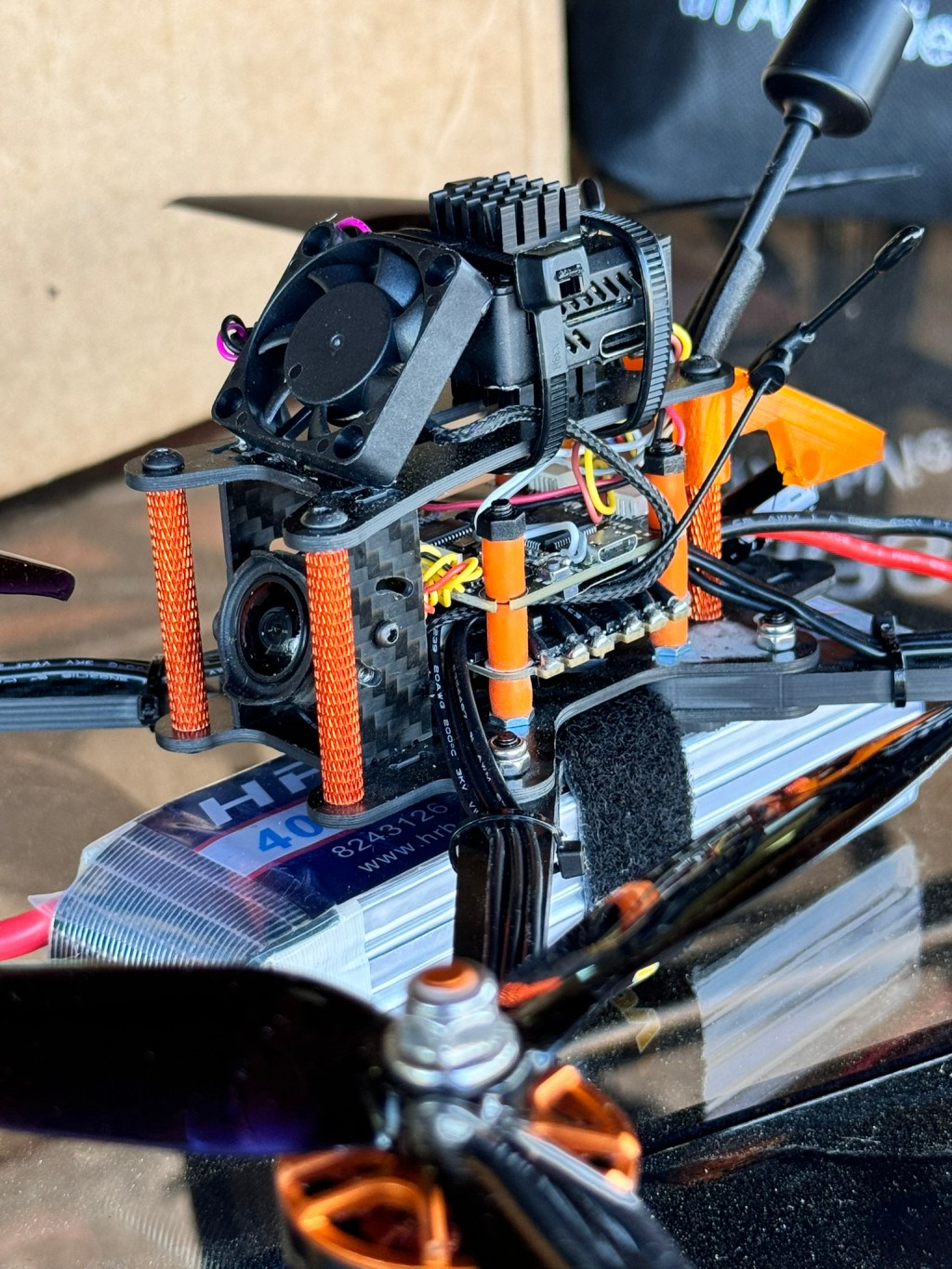
Replaced crashed disco, and rewrote firmware with a custom PID tune to support the Disco’s modified ArduPlane flight stack:


Videos of Flight:
1: Timelapse – parrot disco flight 02-11-2024 (4g mod)
2: Color Corrected Timelapse – Parrot Disco Flight 2-18-2024
3: Long Flight pt.1 – Disco 20240210155017 0800 (FIRST)
4: Long Flight pt.2 – Disco 20240210160806 0800





Leave a comment